科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-07-03
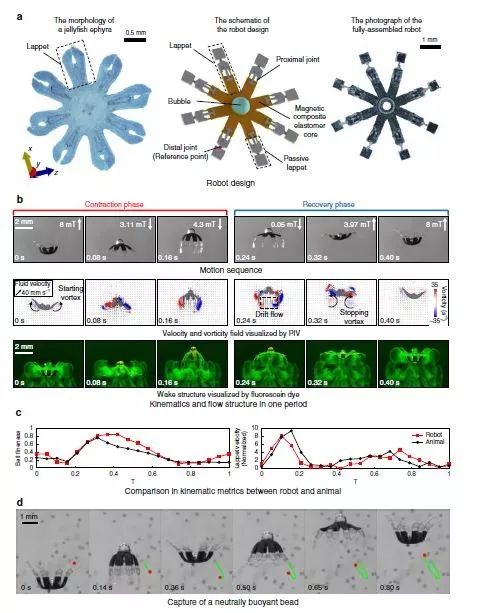
本周《自然-通讯》发表的一篇论文 Multi-functional soft-bodied jellyfish-like swimming 报告了一种以钵水母碟状幼体(scyphomedusae ephyra)为灵感的无缆软体机器人,它仅有几毫米大小,却具备运输和钻挖等多种功能。研究表明,该机器人能够操控其周围的水流动,完成一系列任务。
受水母启发的微型机器人的设计及游泳行为
来源:Ren et al
游泳机器人具有生物医学和环境应用方面的潜力。虽然目前已有能够游泳的微型机器人设计,但是随着机器人尺寸的下降,诸如复杂物体操控等高级功能仍是一项不小的挑战,因为这种机器人可以搭载的组件大小是受限的。
水母机器人的活动情况和各功能展示
来源:Metin Sitti
德国马克斯·普朗克智能系统研究所的Metin Sitti及同事设计并制造了一种仅有几毫米大小的机器人,他们将一个磁性复合弹性体核(直径3毫米)与8个可弯曲的垂瓣连接在一起,施加振荡磁场后,这些垂瓣便会收缩再恢复,就像游泳的水母一样。除了游泳,他们的水母样机器人也能选择性地运输不同大小的球珠(模拟捕食)、钻入球珠中逃避捕食者或目标对象、混合不同的流体以及在其尾迹中生成一条化学路径。作者认为他们的机器人设计也可用作模型系统,帮助理解环境中的变化如何影响水母碟状幼体的生存。
ⓝNCOMMS|DOI: 10.1038/s41467-019-10549-7
来源:Nature-Research Nature自然科研
原文链接:http://mp.weixin.qq.com/s?__biz=MzAwNTAyMDY0MQ==&mid=2652561704&idx=2&sn=d56c62c230e1037c3435d563dce65638&chksm=80cd4fa6b7bac6b055efc0e7f3143b970714f03bb06fcf5b5d1361862c0eb713de7418a05f5a&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

听机器人教育专委会主任讲机器人

生物机器人颠覆机器人定义
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

《机器人》在线论坛--软体机器人,马上开播啦!
机器人造机器人,噱头or风向?

【征稿】《机器人》“医疗机器人技术”专刊征稿开始啦!!!
顺德区数控机械创新应用示范工程及自动化技术交流会召开
人型机器人

听机器人教育专委会主任讲机器人

国际机器人联盟主席:征服世界的机器人


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号