科技工作者之家
科界APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-11-07
来源:高分子科学前沿
导读:由哈佛大学微型机器人实验室打造的小型飞行机器人Robobee近日又获得了新突破,即实现可在柔软的“人造肌肉”驱动下受控飞行,成为了第一款由软驱动器提供动力以实现受控飞行的微型机器人,这一成果刊登在了最新一期的Nature上。
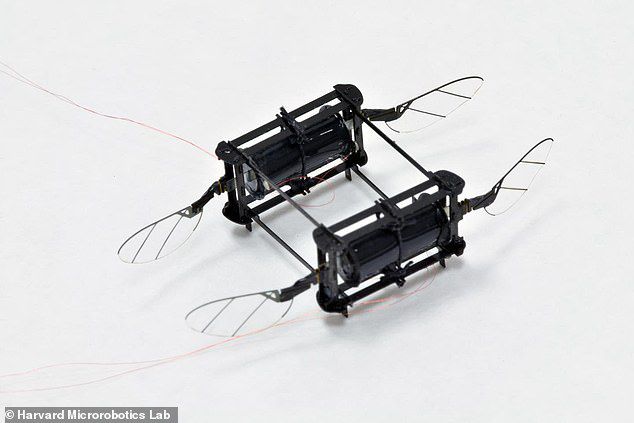
在哈佛大学微型机器人实验室里,我们熟悉的“机器蜂”Robobee展示了新的技能:撞到墙壁、地板、玻璃盒子或其他机器人时,可以“幸免于难”。
而为Robobee保驾护航的是研究团队开发的软驱动器。
哈佛大学微型机器人实验室博士后研究员、论文第一作者陈宇峰博士说:“在微机器人领域,人们大力推动用软驱动器制造移动机器人,因为它们具有很强的弹性。”然而,该领域的许多人一直怀疑软驱动器是否可以用于飞行机器人,因为这些执行器的功率密度还不够高,而且众所周知,它们很难控制。“我们的驱动器具有足够高的功率密度和可控性,可以实现悬停飞行。”这项研究发表在《自然》杂志上。
研究背景
软机器人技术是一个新兴领域,旨在开发能够与人类安全交互并在非结构化环境中操纵精致物体的多功能系统,构建软驱动移动机器人的主要挑战在于开发具有高能量密度,坚固,带宽和长寿命的类似肌肉的驱动器。
事实上,在软机器人技术领域,已经有大量的研究工作去开发可以通过化学,气动,液压,热学或电学等方式驱动的软驱动器,在这些软驱动器中,介电弹性体致动器(DEA)已经显示出类似肌肉的能量密度和带宽,可用于开发仿生和水上运动机器人。
然而,尽管人们对开发比空气重,软驱动的空中机器人的兴趣日益浓厚,但由于限制的驱动器功率密度(<200W kg-1),有限的带宽,致使现有的软机器人无法实现升空 (<20 Hz),也不能像刚性机器人进行结构(如变速器和机翼)集成。
为了实现软驱动机器人的受控悬停飞行,研究人员确定并主要着重解决两个主要挑战:开发具有足够功率密度(> 200 W kg-1)的软驱动器,并设计驱动和控制策略以解决执行非线性问题。
研究方案
为了解决功率密度问题,研究人员在David Clarke实验室开发的电驱动软驱动器的基础上进行了研究,并开发了多层紧凑的DEA,其功率密度为600W kg-1,无需预应变,其次,研究人员将DEA集成到轻巧的襟翼机构中,并利用系统共振来消除由非线性换能引起的高次谐波。
DEA安装在轻型机身上,DEA的两端连接到平面四杆变速器。
研究人员还设计了一个155 mg的襟翼模块,这些模块可以组装成几种配置,并展示出RoboBee各种飞行能力,如被动稳定的上升飞行和控制悬停飞行。四翼双作动器模型可以在杂乱的环境中飞行,在一次飞行中克服多次碰撞。
未来的研究
研究人员表示,为了使软空中机器人能够自主飞行,未来的研究需要降低软执行器的工作电压,提高其功率效率,并进一步提高其功率密度。
为了提高转换效率,未来的研究可能会采用电驱动软执行器的新架构,例如电液Peano-HASEL执行器,可以使用柔性金属电极来减少电阻损耗,为了提高功率密度,可能探索具有更高介电强度和更低粘弹性的电活性聚合物,并将其纳入未来的柔软人工飞行肌肉中。
软驱动Robobee的创造者
哈佛微型机器人实验室由Robert Wood教授建立,隶属哈佛大学约翰·保尔森工程与应用科学学院。该实验室拥有新型机器人设计、制备、测试的多种仪器和设备,通过实验性的方法来开发机器人,并用于研究微机械、致动技术、流体力学、控制和微电子学中的基础科学问题。该实验室研究方向分为微型机器人、仿生机器人和软体机器人三类,曾诞生过RoboBee、 HAMR、Octobot等著名的机器人系统。
论文第一作者,陈宇峰

哈佛大学微型机器人实验室博士后研究员,研究方向为微型机器人、仿生机器人、扑翼流体力学及软体机器人。他在Nature,Nature Communications,Science Robotics等顶级期刊发表多篇论文,研究成果获IROS 2015年最佳学生论文奖。2019年入选福布斯全球30位30岁以下科学精英榜单。陈宇峰博士将于2020年1月起担任MIT EECS助理教授。
论文第二作者,赵慧婵
清华大学机械工程系助理教授、博士生导师。2017年至2018年在哈佛大学微型机器人实验室从事博士后研究。研究方向为软体机器人,包括高能量密度介电弹性体驱动技术、柔性传感器件、可穿戴外骨骼等,相关研究成果发表在Science Robotics、PNAS、Advanced Materials、Advanced Functional Materials、Angewandte Chemie、ICRA等国际期刊和会议上。2016年,以第一作者在Science Robotics创刊号发表研究论文。
论文第三作者,冒杰
浙江大学化学工程与生物学院博士研究生,师从罗英武教授。于2018年加入哈佛大学David R. Clarke教授课题组作访问学者,主要从事高性能热塑性弹性体和介电弹性体的设计、制备和应用,以及3D打印柔性软材料等相关研究。
RoboBee的每一次进步对微型扑翼机器人领域都具有非凡的意义。下一次,RoboBee又将进化成什么样子呢?
论文地址:
https://www.nature.com/articles/s41586-019-1737-7
来源:Polymer-science 高分子科学前沿
原文链接:http://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651724009&idx=4&sn=9739787950acc3226c66182e515640f5&chksm=8b4a0aacbc3d83baf7a099fb3d570739cf25759101ed77a84ed35ce4236c78efbca360660d86&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn

生物机器人颠覆机器人定义

NATURE 人工智能 | 神奇的粒子机器人
顺德区数控机械创新应用示范工程及自动化技术交流会召开

Nature:会踢足球的石墨烯软体机器人

听机器人教育专委会主任讲机器人

仿昆虫的飞行机器人(有视频)| Nature论文
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

机器人
最新Nature报道:智能机器人的福音!
Nature封面突破性研究:新型仿生群体机器人问世


科界APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号