科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-11-17
被动步行的理论是受到哈佛大学学者Mochon和Mcmahon所提出的“弹道步行”模型的启发,由加拿大学者McGeer于20世纪90年代所提出1。被动动态行走是研究双足(两条腿) 步行系统的一种方法,这个系统包括人类或其他双足动物,或你想制作或控制的双足步行机器人。被动动态行走是看待双足步行的一种方式。与其把它作为一个持续不断的努力保持平衡,不如把双足行走看做一 个在足部接触变化的间歇干扰下的持续的被动跌倒,我们可以对它由一个更好的理解。然后可以将一串稳定持续的步子看做周期运动进行分析。
定义被动动态行走是研究双足(两条腿)步行系统的一种方法,这个系统包括人类或其他双足动物,或你想制作或控制的双足步行机器人。被动动态行走是看待双足步行的一种方式。与其把它作为一个持续不断的努力保持平衡,不如把双足行走看做一个在足部接触变化的间歇干扰下的持续的被动跌倒,我们可以对它由一个更好的理解。然后可以将一串稳定持续的步子看做周期运动进行分析。2
基本介绍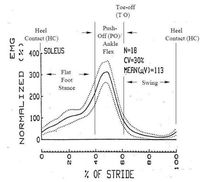 被动动态行走的方法最早由McGeer提出,引发了各种关于人类行走的见解,并已产生了一些自然和有效的步行机。Mochon和Mcmahon对人类步行过程中的摆动阶段进行建模分析,在模型中假设下肢没有力矩作用,依据该模型计算得出的力与关节角度值和人类正常步行时吻合较好,只有竖直方向上地面反力不能很好地吻合。Basmajian等对人类步行时肌电信号的研究结果也证明了摆动阶段肌肉力矩较小2。图2所示为人类步行一步时某一条腿的小腿比目鱼肌的肌电信号。以足触地开始到下一次该足触地结束,在0-40%时间段内为单腿支撑期,40-60%时间段为双腿支撑期,60-100%时间段为摆动阶段,摆动阶段的肌电信号很弱,这为被动步行理论提供了仿生学依据。
被动动态行走的方法最早由McGeer提出,引发了各种关于人类行走的见解,并已产生了一些自然和有效的步行机。Mochon和Mcmahon对人类步行过程中的摆动阶段进行建模分析,在模型中假设下肢没有力矩作用,依据该模型计算得出的力与关节角度值和人类正常步行时吻合较好,只有竖直方向上地面反力不能很好地吻合。Basmajian等对人类步行时肌电信号的研究结果也证明了摆动阶段肌肉力矩较小2。图2所示为人类步行一步时某一条腿的小腿比目鱼肌的肌电信号。以足触地开始到下一次该足触地结束,在0-40%时间段内为单腿支撑期,40-60%时间段为双腿支撑期,60-100%时间段为摆动阶段,摆动阶段的肌电信号很弱,这为被动步行理论提供了仿生学依据。
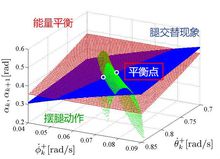
被动行走可以被视为混合系统产生的一种物理现象,其中包括腿摆动动作的连续动态和离散的腿交换事件。分析混合系统得到步态生成和稳定性。
被动步行可以展示一个稳定的极限环。当状态保持稳定极限环,步行系统是稳定的。
McGeer首先由离散时间系统研究被动行走。他证明了雅可比矩阵不动点的稳定性,雅可比矩阵是由线性化离散时间状态方程(称为“步到步方程”)得到。
由Wisse提出的研究被动行走的几点建议如下:
弧形腿。不要使用点型足,因为吸引盆非常小。一个半径约腿长1/3的弧形脚相对更好。
弧形腿可以牢固地附在小腿上,所以没有踝关节。如果你不喜欢这个非人类的特征,弧脚同样可以改为装在脚踝上内附弹簧的扁平足。
前后质量平衡。对每一个新的坡度,可能会需要重新调整前后质量平衡。有两个影响需要同时考虑。首先,前后质量平衡影响每一步加速度和减速度的量。当机器人有一种减慢或向后倒的趋势,将质量前移。如果你移过度了,该机器人将加快并向前跌倒。在这里质量平衡是和脚的位置有很大的关联。如果脚被移前(如大多数膝盖被动步行者),质量也需要一个向前偏移。第二,一条腿内的质量平衡影响被动摆动。在摆动腿要关于其垂直平衡左右对称。所以,如果质量靠后,然后腿摆动会比开始要远。这是好事,因为它降低了前倒的几率。正如McGeer已经指出那样:髋关节摩擦可以通过后移腿部质量补偿。
伪二维。大多数研究人员从二维被动步行开始,用四腿对称的结构。该机器人是不是真正的二维(在我们的物质世界中没有什么东西是二维的),所以重要的要将近似做得尽可能好。需要良好的固定的工作,因为那是一个很好地面。另外一个诀窍在于连接膝盖行走者的弓形垫。
良好的外形工程非常重要。弹跳,挠性,摩擦,关节滑动(所有这一切都不能准确地进行建模)应减少到最低限度。 增大质量。一般来说,腿质量应增大;沉重的髋关节是好的,沉重的脚是不好的。对有膝盖的模型也是一样;小腿应轻巧,其质心应接近膝关节。
对称的步态。腿应是一样的,使机器人对称。如果结果仍然是一个非对称的步态(一个长步子,然后一个短步子),那么这意味着步行周期是刚刚稳定。对于最简单的走路模型,这发生在陡峭的山坡上。尝试调整等参数使不对称性消失。
髋关节极限点。髋关节有极限位置有利于稳定性。1
渊源 上世纪八十年代,加拿人学者T.McGeer提出了被动动力学理论,并由此有了“机器人被动行走”的概念。T.McGeer设训了一类简单的双足无动力行走机器人,其行走是在小倾角斜面上由上而下靠自身重力驱动实现的。T.McGeer对其被动机器人模型行走动态和稳定性进行了研究,由此开启了双足行走机器人研究的有一领域——久驱动机器人。日本学者运用被动步行原理制作的无动力步行机器人更是在2009年创下了连续行走13小时45分钟(15.2km)的世界记录。无动力双足机器人动力特性的研究有助于揭示人类双足行走的内存机理,解释人类行走稳定性、鲁棒性、高效率的原因。
上世纪八十年代,加拿人学者T.McGeer提出了被动动力学理论,并由此有了“机器人被动行走”的概念。T.McGeer设训了一类简单的双足无动力行走机器人,其行走是在小倾角斜面上由上而下靠自身重力驱动实现的。T.McGeer对其被动机器人模型行走动态和稳定性进行了研究,由此开启了双足行走机器人研究的有一领域——久驱动机器人。日本学者运用被动步行原理制作的无动力步行机器人更是在2009年创下了连续行走13小时45分钟(15.2km)的世界记录。无动力双足机器人动力特性的研究有助于揭示人类双足行走的内存机理,解释人类行走稳定性、鲁棒性、高效率的原因。
传统的仿人双足机器人大多都需要在每个需要运动的关节部分安放驱动电机,它们的每一个动作都需要电力驱动电机去执行。同时要实现双足步行必须预先写入控制程序,控制程序控制步行时的每一个动作,所有的步态(步行)都是事先决定的,而且所有的脚位置都被程序计算出来的,这个时间点哪些电机需要运作了,这些电机运动完后接下来哪些需要运动了都是由控制程序预先控制好的。虽然也可实现类人行走和跑步,但控制机理与人类不同,且能耗性很高。例如McGeer制作的半被动步行机器人的无量纲步行机械能能耗为 0.055,与人类步行时的这一数值与之相当,为 0.05,而 本田公司的ASIMO 的这一数值为 1.6,是人类行走能耗的二十倍以上.被动行走为实现高效自然行走提供了一个可能的解决途径。
其实,要做双足机器人最基本的工作就是实现他的迈步。迈步要怎样做呢?抬腿加迈腿就可以前进了。咱们都知道,东西斜着拿,手渐渐放松会怎样?会旋转有木有?咱们就利用这个现象让机器人迈腿,(原理是当脚的在平稳状态时轴点与重心不平衡当脚抬起时就会迈动。)至于抬腿的实现,其实咱们不让机器人抬腿,让每只脚下的地面交替变低达到的效果是一样的,其实就是在斜面上下坡行走就可以了。
我们用“探索者”成功实现了一个被动行走机器人,这个机器人模型个头虽小,但是表现相当不错。我们给它取个名字叫walker。下面开始机器人的制作工作吧!2
本词条内容贡献者为:
孔祥杰 - 副教授 - 大连理工大学软件学院


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号