科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-01-09
来源:中国指挥与控制学会

美军长期致力于发展可与士兵协同作战的机器人,研究的目标为基于仿生学设计出像长期受训的动物一样,能够听从人类指挥、服从人类命令、协助人类完成任务的机器人。

当前,随着军事和商业领域对此类研究的不断深入,仿生机器人的迭代创新正在持续加速,特别是四足仿生机器人。让机器人具有实用性能力,满足一系列需求,包括实现机器人的自主导航,机器人作为“驮畜”的负重能力,以及机器人通过“观察”人类来执行任务的能力。近期,美国围绕四足仿生机器人开展了一系列研究,主要包括以下三项。
1
“腿式运动和运动适应系统”(LLAMA)项目
该项目由美陆军研究实验室(ARL)发起,通过“机器人协作技术联盟”(RCTA)计划启动,旨在设计一种高度自主的机器人,能够跟随士兵在各种复杂地形环境中执行任务。LLAMA项目研发的机器人是一种以工作犬为蓝本、能与士兵协同工作的自动四足运动研究平台系统。目前,ARL通过与NASA的喷气推进实验室、人类与机器认知研究所等机构合作,已研发出LLAMA的原型机,该系统能够按士兵发出的口头指令行动,并在战地独立移动,以完成任务。LLAMA原型机采用全电动设计,装配了高扭矩执行器,嵌入了高级的感知与控制算法。同时,研究人员通过优化设计减轻了机器人的自重,提高了机动性、防护能力和杀伤力。LLAMA原型机的运动模式包括两种,一种是默认的向前移动模式;另一种是精细模式,通过激活额外的传感器对周围环境进行扫描,从而控制机器人进行更精确、更仔细的运动。
2
“大狗”(BigDog)机器人

“大狗”机器人由波士顿动力公司研制,该系列的最新型号名为Spot。Spot机器人采用电池供电,驱动设备为液压系统,免去了油料燃烧产生的噪声,相比“大狗”机器人更加安静;采用了激光雷达导航,增加了机器人对环境的理解和认知能力,可实现在复杂的室内和室外环境中操作。与之前的“大狗”机器人折角向前的膝关节设计不同,Spot机器人的膝关节采用的是像山羊腿一样的折角向后设计,可在崎岖不平的道路上坡下坡,拥有十分强大的平衡能力。与“大狗”机器人专为美军设计不同,Spot机器人具有很强的军民两用性。
3
Minitaur机器人

该机器人由“幽灵”机器人(Ghost Robotics)公司研发,其配备的传感器能跟踪机器人腿部执行机构的电流波动,以此作为控制算法的反馈输入,从而使机器人在跳跃或蹒跚前进时保持直立。Minitaur机器人的四足可根据环境动态的改变步法,能实现爬坡,在遍布岩石的地面行走,在冰上行走,即使打滑也能维持平衡,跳起跌倒翻转后能迅速站立。Minitaur机器人的应用领域十分广泛,可用作军事、勘探、采矿、农业和危险环境中的自主传感器工具。
来源 :美国C4ISR网站/图片来自互联网
北京航天情报与信息研究所 张梦湉
编辑:刘伟雪
转自:“国防科技要闻”(ID:CDSTIC)
注:原文来源网络,文中观点不代表本公众号立场,相关建议仅供参考。
投稿邮箱:liuyali@c2.org.cn
长按下方二维码 免费订阅
C2
如何加入学会
注册学会会员:
个人会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“个人会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可在线进行支付宝缴纳会费。
单位会员:
关注学会微信:中国指挥与控制学会(c2_china),回复“单位会员”获取入会申请表,按要求填写申请表即可,如有问题,可在公众号内进行留言。通过学会审核后方可缴纳会费。
长按下方学会二维码,关注学会微信

来源:c2_china 中国指挥与控制学会
原文链接:https://mp.weixin.qq.com/s?__biz=MzA4ODcwOTExMQ==&mid=2655591352&idx=4&sn=2e8301beb5bc25aa8c30b8cfddcba165&chksm=8b9bb920bcec3036cce30b0942d82293818fa2656595e318ec57bd1aceec48238f9de16143db#rd
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
“制造业转型升级”论坛在深圳举行
第九届湖南省青少年机器人竞赛在株洲举行


1800余名选手参加南通市教育机器人竞赛



仿生机器人技术应用的春天来了么?| CNCC2021

CICC科普栏目|逼真到让人震惊的德国仿生机器人!

科普一分钟 | 仿生机器人太空当“捕手”
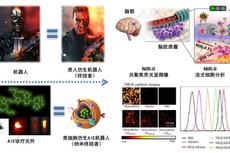
深圳先进院AIE纳米仿生机器人研究取得重要进展
苏州首届青少年科技节打造“小创客”的科技盛宴
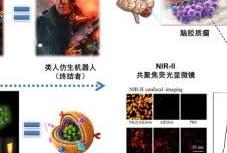
聚集诱导发光纳米仿生机器人研究获进展

自修复材料使仿生机器人研究取得突破


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号