科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2020-02-18
机器人材料科学家旨在解决软机器人在动力驱动、移动控制和动力需求方面的问题。《科学进展》杂志报道,美国斯坦福大学研究人员Nicole W. Xu和John O. Dabiri等展示了一款生物混合机器人,能够利用板载微电子技术诱导、增强活水母的游动。
测试结果显示,尽管微电子设备的外部电源低至10兆瓦,且动物新陈代谢消耗只提高2倍,但水母的游泳速度提高了近3倍。这种新型生物混合机器人的单位质量-外部能量消耗值仅为此前报道的1/10~1/1000,在海洋监测领域有良好的应用前景。
水母是一种极具吸引力的模型生物。虽然现有的仿生机器人的游动速度已经不输于大多数动物,但其效率仍比水母低若干数量级。研究人员认为,水母混合机器人既充分利用了水母结构作为驱动载体,还能依靠其自体进食行为解决能量需求。此外,这种混合机器人还能够自愈损伤,以及为活体生物力学提供研究数据。
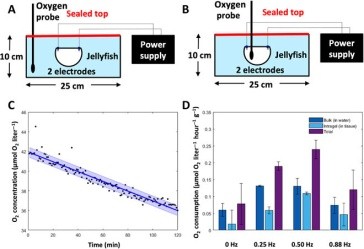
为了激活水母作为天然支架,研究人员借助其自身的基础新陈代谢减少了额外的能量需求,利用水母肌肉作为驱动装置,同时依靠其自愈和组织再生特性提高了可靠性。研究人员认为,增强水母的钟形收缩频率可以将游动速度提高到极限值。为此,他们通过控制脉冲频率和测量动物的游动速度、吸氧量,计算出了运输成本(COT),验证了此前的假设。此前,这种检验实验只能通过计算或者理论模型来实现。
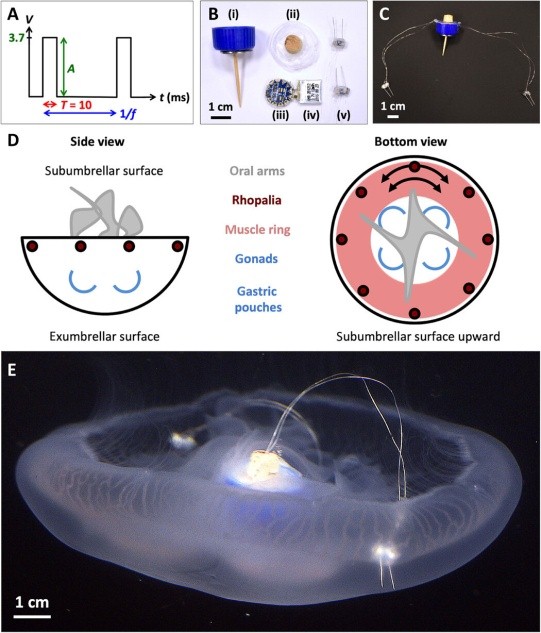
Xu等使用海月水母作为模型生物,它主要通过收缩肌肉减少腔体体积和排水,进而为游动提供推动力。为了启动肌肉收缩,水母需要激活感光器中的光起搏器。起搏器神经簇激活整个运动神经网络,产生双向肌波传输。
研究人员设计了一种简易的、自供能微电子游泳控制器,它包含一个微型处理器和一个10毫安锂聚合物电池。控制器能产生方波脉冲,刺激水母肌肉产生0.25~1.00赫兹的收缩。为了更直观地观测电信号,Xu等将电线与小型发光二极管进行了串联,然后将电极插入水母的伞状组织(subumbrellar)中。
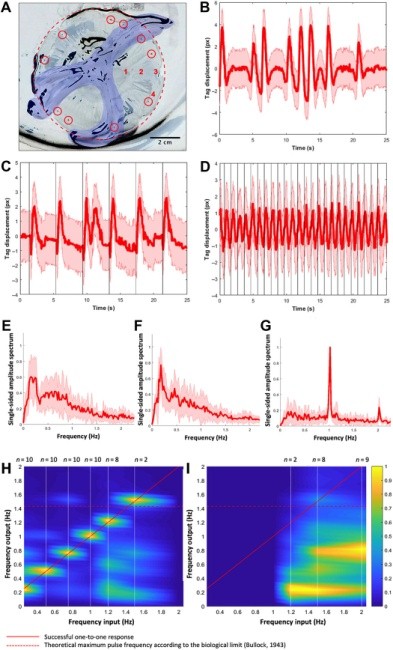
研究人员发现,动物行为(内源性收缩)是不规律的,具有高脉冲率可变性,平均峰值频率为0.16赫兹。外部驱动下,水母肌肉的生理极限收缩为1.4~1.5赫兹。经归一化计算,研究人员认为板载微电子设备使水母的游动速率提高了2.8倍。
Xu等还使用纯机械机器人、自动水下航行器和大鼠心肌细胞-硅支架生物混合机器人进行了对照实验。结果显示,水母机器人的功耗最低,并且微电子系统的成本不足20美元。此外,电定位效果也是非特异性的,动物在实验后可立即恢复。
Xu等设计的原型机对于活体动物和微电子系统的融合有较高的借鉴价值。在未来,研究人员还计划深入展开无伤害情况下、动物内源性收缩等方面的研究,从而进一步提高生物混合机器人的可控性。
科界原创
编译:雷鑫宇
审稿:alone
责编:唐林芳
期刊来源:《科学进展》、《科学机器人》
期刊编号:2375-2548, 2470-9476
原文链接:
https://techxplore.com/news/2020-02-microelectronics-embedded-jellyfish-propulsion.html
版权声明:本文由科界平台原创编译,中文内容仅供参考,一切内容以英文原版为准。转载请注明来源科技工作者之家—科界App。

机器人时代:仿人机器人
第九届湖南省青少年机器人竞赛在株洲举行



【征稿】《机器人》“医疗机器人技术”专刊征稿开始啦!!!

机器人

听机器人教育专委会主任讲机器人
“制造业转型升级”论坛在深圳举行
我会副理事长兼秘书长张彦敏一行调研广东省机械行业人才状况

生物机器人颠覆机器人定义

国际机器人联盟主席:征服世界的机器人
社交机器人


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号