科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2017-10-13
【导读】MIT计算机科学与人工智能实验室正在研发一种新型的变形机器人,不久的将来,“变形金刚”可能就会成为现实。据了解,这一机器人通过穿戴不同的外骨骼来执行动作和变形,这些外骨骼的初始形态是塑料材质的薄片,当加热时可以折叠成特定的形状。更神奇的是,在完成任务后,它可以通过将自己浸泡在水里来溶解外骨骼,从而脱下它的“皮肤”。
CSAIL的变形机器人:可以用不同的“装备”来改变自己的形状
关于机器人,有一项较新的研究值得注意。
今日的机器人仍然是相当不灵活的。它们的每个部分通常都有着固定的结构,有一个确定好的功能,这使得它们不容易执行多种多样的操作。
麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员正在研发一种新型的变形机器人来改变这一现状:它可以用不同的“装备”来改变自己的形状,从而可以执行不同的任务。
这个机器人被称为“Primer”,通过磁铁控制,它可以行走、滚动、浮游和滑翔。它通过穿戴不同的外骨骼来执行这些动作,这些外骨骼的初始形态是塑料材质的薄片,当加热时可以折叠成特定的形状。Primer在完成任务后,可以通过将自己浸泡在水里来溶解外骨骼,从而脱下它的“皮肤”。
CSAIL的主管、也是该项目的主要研究员 Daniela Rus 说:“如果我们想让机器人帮我们做事,每个任务都需要不同的机器人,这是非常低效的。”他说:“通过这种由动物的变形启发的方法,我们可以在不同的情况下为机器人提供不同的’配件’,从而扩展单个机器人的功能。”
Primer的各种形态都有不同的优点。例如,“车轮型”有轮子,它的移动速度是“步行型”的两倍。“船型”可以漂浮在水面上,能够携带两倍于自身重量的物品。“滑翔型”可以滑行更远的距离,这对于部署机器人或切换不同的环境是很有用的。
Primer甚至可以同时穿多套“衣服”,就像俄罗斯套娃一样。它可以添加一个外骨骼,变身为“步行型”机器人,然后再套上另一个更大的外骨骼,使其能够携带物品,每秒钟移动的距离是它身长的两倍。
MIT博士后Shuguang Li是该研究的共同作者之一,他说:“想象一下这种机器人未来在太空探索上的应用,你可以将一个机器人和许多外骨骼发送到火星上,机器人可以通过选择穿上不同的外骨骼来完成不同的任务。”
该研究由Daniela Rus和Shuhei Miyashita共同领导,Miyashita曾在CSAIL攻读博士后,现在是约克大学的微型机器人组的负责人。该研究的其他共同作者包括Shuguang Li 和 Steven Guitron,研究论文已发表在最新一期Science Robotics。
机器人变形:如果可以只更新机器人的某个部件,为什么还要更换整个机器人呢
Primer 整合了Rus团队此前研究的多种技术,包括可以自己组装成不同形状的磁铁,以及可以精确定制塑料片外形的厘米长的微型机器人
虽然在更大尺寸的规模上改变机器人的形状或功能已经实现,但在微型机器人上实现这样的构造是相当困难的。
“这项工作在他们此前的研究基础上更进了一步,他们现在能让机器人实现5种不同的形态,”多伦多大学的机械工程助理教授、微型机器人专家 Eric Diller 说,以前的工作最多只能在两种形态之间切换,比如“展开”或“收起”。
研究人员阐述了这类机器人的潜在应用,例如,假如需要运送一些物品跨过水流,一个具有多种外骨骼的机器人可以横渡水流,然后在另一侧装载物品。
“我们的方法显示,这种由折纸启发的可变形机器人使我们能够拥有通用的、易得的和可重复使用的机器人组件。”Rus说。
这些外骨骼的设计只需要几小时,加热几秒钟后就可以折叠成形,展现了一种快速制造机器人的新方法。
Diller说:“我可以想象类似这样的设备被应用在’微型工厂’,其中,预制的组件和工具可以让一个微型机器人完成许多复杂的任务。”
下一步,该团队计划探索让机器人增加更多能力,例如在水上驾驶,在沙地上挖洞,甚至变成伪装色。
“我可以想象有一天,我们可以定制机器人的各种手臂和组件,”Rus说,“如果可以只更新机器人的某个部件,为什么还要更换整个机器人呢。”
Homayoon Kazerooni:外骨骼技术大师
说到外骨骼,不能不提到加州伯克利机器人和人体工程学实验室主任 Homayoon Kazerooni 教授。
Homayoon Kazerooni 是加州大学伯克利分校机械工程学教授,伯克利分校机器人和人体工程学实验室主任,拥有麻省理工学院博士学位和 30 多年的机械工程经验,是机器人、控制学、外骨骼、人机系统和增强、生物工程、机电一体化设计、智能辅助装置以及推进器领域的顶尖专家。

HULC 单兵外骨骼
目前 Kazerooni 博士的工作重点是下肢人机系统控制。在开发了 BLEEX,ExoHiker 和 ExoClimber 三种超轻负载外骨骼之后,他在伯克利的团队创建了 HULC(Human Universal Load Carrier)。这是第一套电池驱动的下肢外骨骼,允许其用户在不同的地形负载 200 磅的重量行进,而不会感觉疲惫不堪。
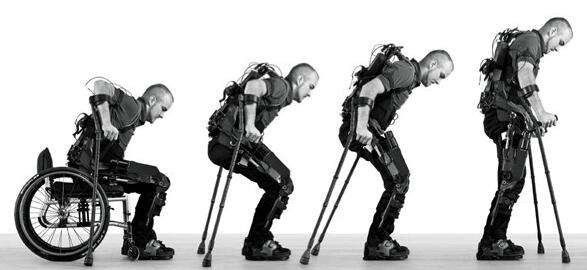
Kazerooni 博士还开发了帮助中风、脊髓损伤等患者的下肢外骨骼技术。他的医学外骨骼 Ekso 已经成功地让那些已经瘫痪的人以直立的姿态与正常人一起走路、站立。
(来源:MIT)

继无人车后,谷歌开始协助劳斯莱斯来训练他们的自动驾驶轮船AI系统

AI地球

人类智慧与人工智能:医生的AI,还是AI医生?

【诺贝尔物理学奖幕后的AI】刷屏的“引力波”,得益于AI技术的进步

AI的挫折
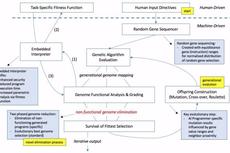
【AI系统首次实现真正自主编程】利用遗传算法,完爆初级程序员
AI有多接近你,你又有多害怕AI
AutoML研究综述:让AI学习设计AI
Google:用AI设计AI芯片!极大缩短芯片设计周期

AI医生、AI书法家、AI情绪识别设备……一起感受AI生活


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号