科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-10-12
来源:高分子科学前沿
神经突触是神经元之间传递信息的关键部位,其独特的生物学结构可使其在生物体内传输电或化学信号,从而实现感官和思维的编码。在生物体内,神经突触通常十分柔软并且能够随着身体运动适应各种形式的机械形变。例如,蚯蚓的神经可延展到自身长度的50%到100%,同时仍能够响应来自周围环境的不同刺激。
近年来,工程科学的快速发展制成了各种软体系统,比如只能皮肤,软体机器人等。然而如何让电子皮肤有类人皮肤的感知到大脑认识的功能,以及如何让机器人像人和动物一样判断,思考?这些带有了神经功能的软体系统还没有实现。
最近,美国休斯顿大学(University of Houston)的余存江 (Cunjiang Yu) 教授课题组的研究以“Stretchable elastic synaptic transistors for neurologically integrated soft engineering systems” 为题发表在Science 子刊Science Advance上。
该文章首次报道了可拉伸弹性神经突触晶体管。该晶体管全部基于橡胶电子材料而成,且在50%的拉伸的条件下,突触晶体管本身仍具有完整的生物神经突触特性。同时,受软体动物的启发,通过可拉伸弹性突触晶体管与软系统的集成,研究人员构建了可变形的触觉感知皮肤和自适应软体神经机器人。同时,通过对突触记忆信号的编码,研究人员实现了自适应软体机器人的自主“思考”与移动。
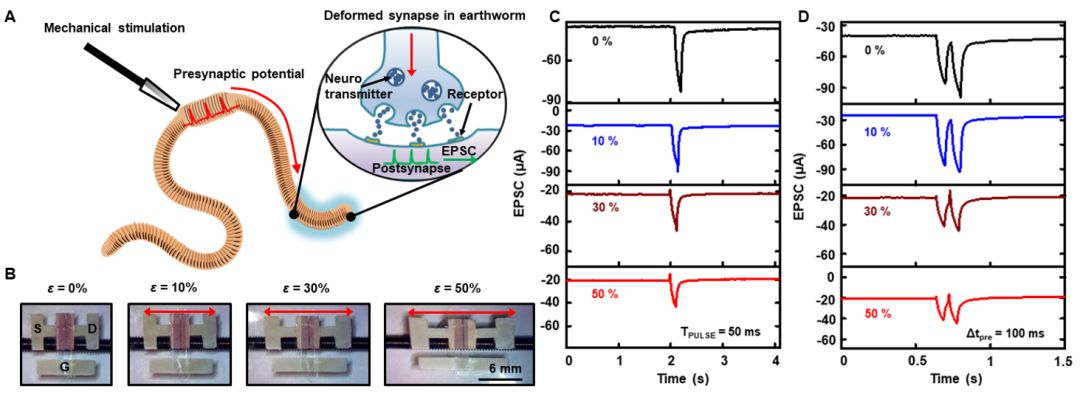
图1:可拉伸弹性神经突触晶体管
该可拉伸弹性神经突触晶体管由全橡胶电子材料组成,其中包括橡胶导体 (AuNPs-AgNWs/PDMS), 橡胶半导体(P3HT-NFs/PDMS),以及弹性栅隔离层(离子凝胶)。在静态以及高度拉伸(50%机械拉伸)状态下,可拉伸弹性神经突触晶体管展现与生物神经突触相似的功能,包括兴奋性突触后电流(EPSC)与双脉冲易化(PPF)。
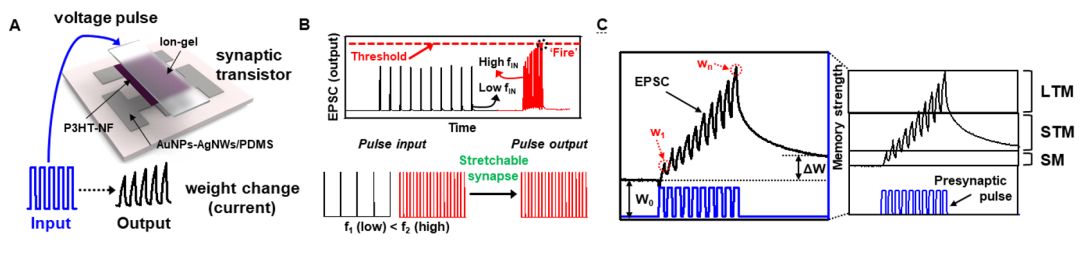
图2:可拉伸弹性神经突触晶体管在静态和不同机械拉伸的条件的滤波以及记忆特性
同时,研究人员研究了可拉伸弹性神经突触晶体管在不同条件下的滤波以及记忆特性。通过不同频率与次数的脉冲刺激,该可拉伸弹性神经突触晶体管展现出了与生物神经系统相似的特性,包括滤波特性,短时记忆(STM)和长时记忆(LTM)。在拉伸状态下,器件本身保持了完整的生物神经突触特性。
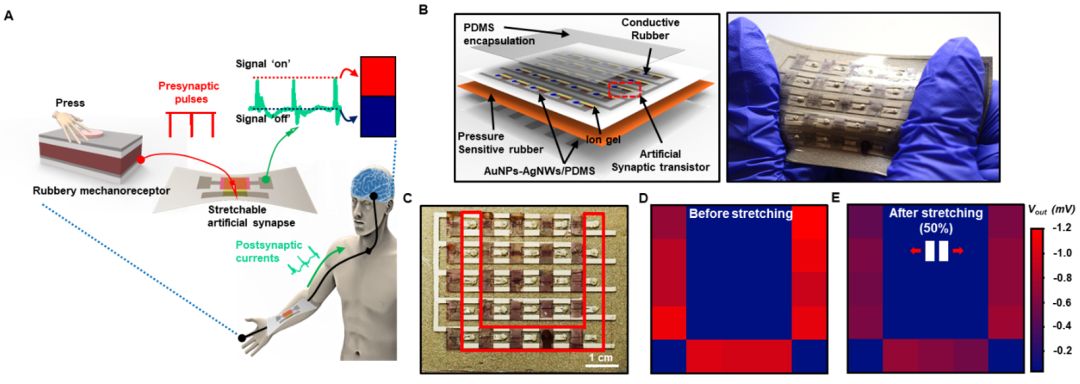
图3:可形变的神经系统集成的触觉感知皮肤
同时,研究人员制备了集成了神经突触晶体管的全橡胶触觉感知皮肤。该全橡胶触觉感知皮肤由图形化的栅电极,压敏橡胶以及全橡胶突触晶体管阵列组成,且表面由PDMS封装。感受器感知外界机械刺激并产生突触前脉冲,进而激发神经突触晶体管产生突触后电位。检测到的不同位置的突触后电位可以用于表征阵列分布,从而使其具备“触觉感知”。这种感知皮肤可以作为人造假皮肤跟人体进行直接通信。
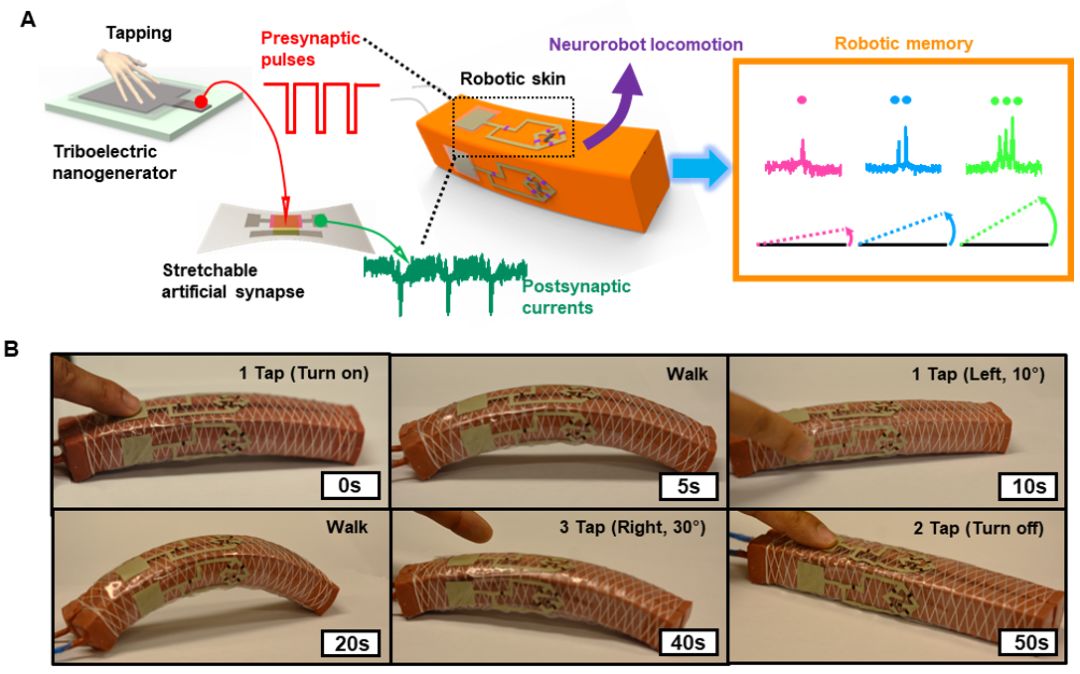
图4:神经集成的自适应软体机器人
研究人员进一步创建了一种神经集成的自适应软体机器人。该机器人由摩擦电纳米发电机和可拉伸弹性神经突触晶体管构成的柔性功能性皮肤以及软体气动机器人组成。在敲击条件下,摩擦电纳米发电机产生电脉冲,进而激发神经突触晶体管产生突触后电位。 通过对不同敲击次数导致的EPSC变化进行编码,神经机器人实现了程序化的不同程度的的弯曲以及自适应地运动。值得一提的是,该机器人在感受突触后电位的变化后,可以实现自行“思考”。
这项工作验证了神经集成的软系统的可行性,为未来实现大规模可拉伸弹性神经突触晶体管的应用(如神经形态计算,神经修复术等)提供了新的技术思路,向未来研究复杂复合功能的工程系统迈出了第一步。作者同时指出目前构建的神经集成的软系统的功能还比较简单,其复杂程度远远低于生物学神经系统。未来需要进一步探索和开发具有新结构和多功能的神经集成的软系统。
文章的第一作者是休斯顿大学余教授课题 的博士生Hyunsoek Shim,其他作者包括余教授课题组的Kyoseung Sim,Faheem Ershad, 杨品亦, Anish Thukral, 饶州铝等等,以及上海交通大学的谷国迎教授,南京邮电大学的高丽教授,南京大学的王欣然教授,和香港理工大学的柴杨教授。文章的通讯作者为休斯顿大学的余存江教授。
全文链接:
https://advances.sciencemag.org/content/5/10/eaax4961
来源:Polymer-science 高分子科学前沿
原文链接:https://mp.weixin.qq.com/s?__biz=MzA5NjM5NzA5OA==&mid=2651723171&idx=1&sn=ce7eb5f7b3420fbd44d771bb547ef9b4&chksm=8b4a07e6bc3d8ef0574e5f40bef56f801732a8d5f9587055dfab87303462380943a0e09741d4&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
马林看望第十七届青少年机器人竞赛北京队参赛师生



自适应数据采集

科普一分钟 | 为什么运动后要拉伸?

深圳先进院开发出双引擎自适应的酵母微纳生物机器人
顺德区数控机械创新应用示范工程及自动化技术交流会召开

杜学敏&吴新宇AFM:仿生自适应水凝胶微型机器人的变形、伪装和变色
领域自适应
苏州首届青少年科技节打造“小创客”的科技盛宴
自适应进给系统
1800余名选手参加南通市教育机器人竞赛




科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号