科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2019-06-06
来源:中国工程院院刊
1.
HIFU
高强度聚焦超声(high-intensity focused ultrasound,HIFU)是一种很有前景的治疗癌症的方法,它是非介入式超声治疗技术,可以将精确聚焦的超声波束作用于身体内的某一小部分,HIFU波束中的能量可以导致靶组织的热坏死。
最有利的是,该技术可以选择性地破坏深层恶性组织,而对波束路径上的表面组织及其周围的组织几乎没有损伤。
为充分利用HIFU的非介入性,研究者将HIFU技术融入现代图像引导的机器人辅助手术系统模式中。
2.
机器人辅助HIFU系统
通常图像引导机器人辅助系统包括三个主要部分:医学成像系统、机器人治疗系统和医疗导航系统。成像系统与治疗系统分别扩展了外科医生眼睛和手的功能,导航系统与手眼系统的坐标系相关联。因此,导航系统在精准的外科治疗中至关重要。
传统的超声诊断系统仅提供目标区域的二维图像。为了给HIFU治疗方案创建精确的三维图像集,利用机器人系统来收集一系列二维超声图像,并从堆栈中重建出三维超声图像。为此,研究者提出了基于超声引导的机器人辅助HIFU系统,这是一种精确、低成本的乳腺癌治疗解决方案,最终的目标是促进HIFU治疗,并且提高患者的生活质量。
HIFU系统主要由三个部分组成:一是具有控制器单元的HIFU换能器,为治疗提供所需要的能量;二是超声成像系统,为导航系统提供必要的诊断信息;三是定制的五自由度并联机器人系统,可操纵HIFU换能器和改进的超声成像换能器。
两个转换器可以固定安装在机器人系统的末端执行器上。改进的成像换能器的高程焦距为60mm,比普通商用换能器可以获得更好的深度图像分辨率。五自由度机器人系统精准操纵HIFU换能器和成像换能器,进行诊断扫描和治疗定位。

☝ 硬件系统组件及其连接关系
PC1为HIFU换能器驱动器配置焦点数据,通过通用串行总线—通用异步接收器/发送器电缆来发送命令。
PC2协调整个HIFU系统,通过通用串行总线—模拟输入输出单元设置HIFU换能器的输出电平,并且利用具有数字视频接口—串口总线接口的视频采集器接收来自超声成像系统的二维超声图像。
PC2还通过局域网电缆与机器人控制器通信,来设置和跟踪机器人的姿态。
机器人控制器使用USB转RS232C电缆连接到控制旋转角度的电机,其他4个电机通过USB—控制器LAN电缆连接到机器人控制器。
3.
HIFU系统治疗步骤
在超声引导的前提下,成功的HIFU治疗需要多个处理步骤:
根据机器人的扫描结果重建三维超声图像,为了将每个体素(三维空间中定义一个点的图像信息的基本单位)与相对于机器人工作空间的位置信息相关联,将机器人的姿态信息与二维图像一并收集;
外科医生检测和分割出目标区域(即肿瘤/恶性组织);
根据分割结果来确定HIFU治疗点的分布,并计算出机器人到每个治疗点的工作路径;
将路径信息和其他设置发送给机器人,机器人执行处理。
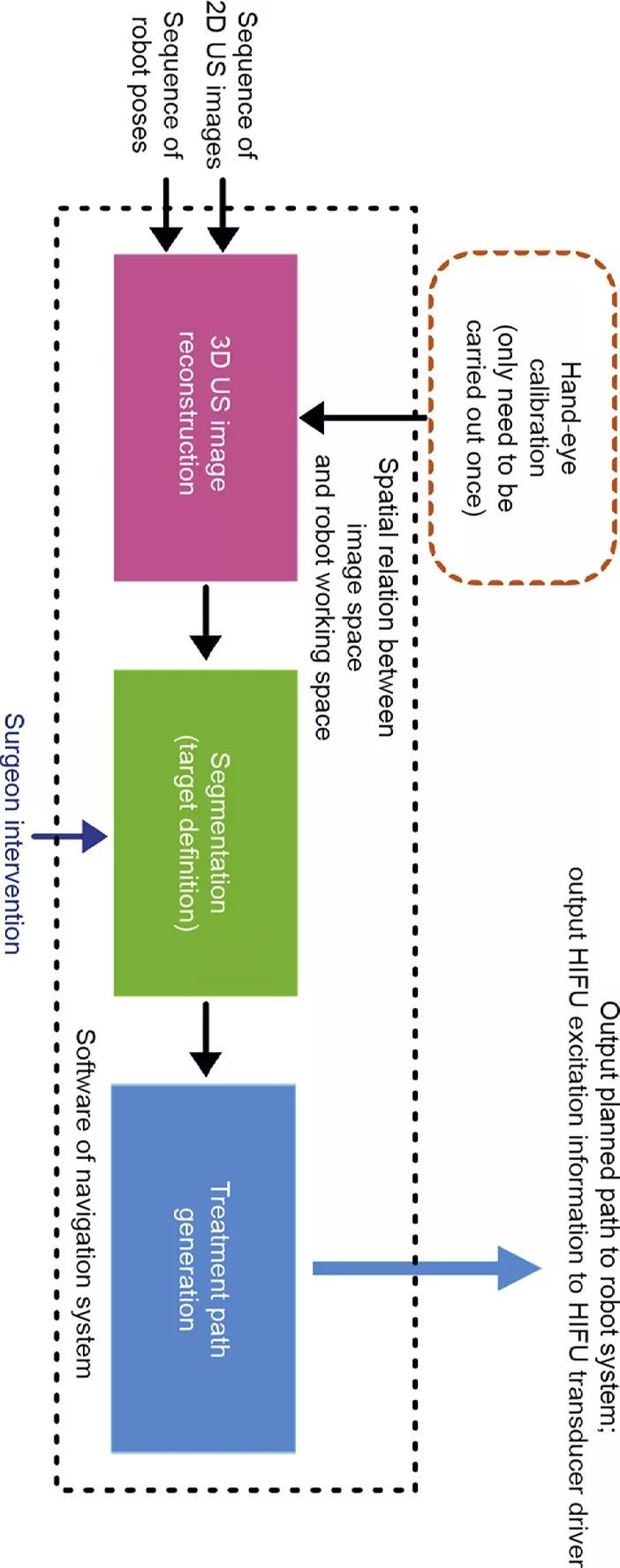
☝ 导航系统软件框图
<<请旋转手机查看>>
为了实现高效准确的HIFU治疗,导航系统应该引导患者完成治疗流程,从图像采集到执行治疗。为了获得超声图像空间和机器人工作空间之间的正确空间关系,还需要手眼标定。

在系统评估实验中,拟治疗区域的中心偏离HIFU-消融区域的中心的距离小于2mm,在临床治疗应用中,外科医生通常允许10mm的安全裕度来保证完全治疗。从这个角度来看,目前的超调值远低于允许值,考虑到外科医生设置了治疗超调的界限,这种准确性被认为足以完成治疗,并且该系统是足够准确的。
在今后的工作中,可通过增加治疗方案的灵活性来改进系统,并在三维空间中评估治疗的准确性,还应考虑组织不均匀性引起的非均匀声速的影响。
☟ 改编原文
Tianhan Tang,Takashi Azuma,Toshihide Iwahashi,Hideki Takeuchi,Etsuko Kobayashi,Ichiro Sakuma.A High-Precision US-Guided Robot-Assisted HIFU Treatment System for Breast Cancer[J].Engineering,2018,4(5):702-713.
来源:Engineering 中国工程院院刊
原文链接:http://mp.weixin.qq.com/s?__biz=MzA3MTUwNjU3NQ==&mid=2651031058&idx=1&sn=c7d6f65611089f41baec7dea45da370d&chksm=84dba9f2b3ac20e40d228cefc0978a4d9d1b9172427185485c086ba0c94a738b7a3062531d48&scene=27#wechat_redirect
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
机器人纪元

听机器人教育专委会主任讲机器人

用机器人制造机器人 上海将建ABB全球最先进机器人工厂

机器人合集
人型机器人
机器人造机器人,噱头or风向?
梦想机器人
马林看望第十七届青少年机器人竞赛北京队参赛师生



机器人理财

机器人


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号