科技工作者之家
科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
科技工作者之家 2018-03-12
近期,自动化所复杂系统管理与控制国家重点实验室的喻俊志研究员带领其团队提出了一种基于视线导航法和滑模观测器的滑模模糊(SMFC)控制算法,解决了一类鳍肢机动型机器海豚的定深控制问题,相关成果发表在自动化控制领域的顶级国际期刊IEEE Transaction on Industrial Electronics上。
团队首先分析机器海豚的定深控制机制,通过改变双侧鳍肢的偏转角来实现机器海豚的上浮/下潜;进一步忽略其偏航、横滚运动,简化动力学方程;其次,采用视线导航法将定深控制问题转化为俯仰角跟踪控制问题。考虑到机器海豚实现上浮/下潜必须有一定的前进速度提供俯仰力矩,采用滑模观测器来实时估计线性速度,结合视线法与滑模观测器来设计复合滑模控制器获取定深过程中的驱动力和偏转力矩。由于鳍状肢的偏转角与偏转力矩存在非线性关系,偏转力矩无法直接作用在机器海豚上,最后采用模糊控制策略,将驱动力、驱动力的变化率和偏转力矩、偏转力矩的变化率分别映射到机器海豚的腰、尾关节的拍动频率和鳍肢的偏转角上。在实验过程中,要求其维持在0.4 m的深度,定深过程的视频序列如图1所示。机器海豚在所提策略的控制下能够维持在目标深度,验证了该策略的有效性。
进一步与传统的PID控制器进行对比,两者的深度误差分别是0.18 cm(所提控制策略)和0.38 cm(PID控制器)。通过对比发现所提控制策略较传统的PID控制器具有更快的收敛速度和更好的稳定性。同时,该控制策略还应用到仿生机器海豚的平面路径跟踪上,取得了较为满意的跟踪效果。
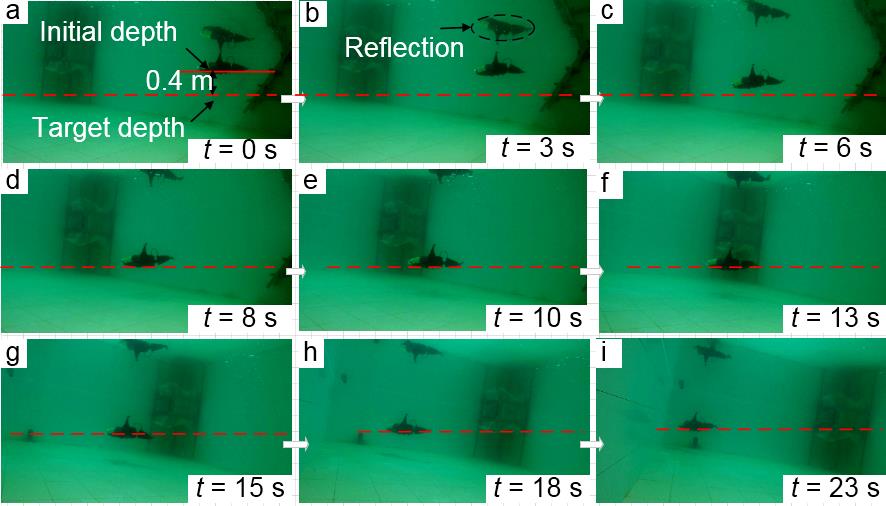
图1 定深实验视频序列
本文研究成果《Depth Control of a Bioinspired Robotic Dolphin Based on Sliding-Mode Fuzzy Control Method》发表IEEE Transaction on Industrial Electronics(vol. 65, no. 3, pp. 2429-2438. Mar. 2018)上。
内容来源:中国科学院自动化研究所
来源:中国科学院自动化研究所
原文链接:http://www.ia.cas.cn/xwzx/kydt/201803/t20180312_4972093.html
版权声明:除非特别注明,本站所载内容来源于互联网、微信公众号等公开渠道,不代表本站观点,仅供参考、交流、公益传播之目的。转载的稿件版权归原作者或机构所有,如有侵权,请联系删除。
电话:(010)86409582
邮箱:kejie@scimall.org.cn
研究进展:Adv. Energy Mater.-电荷泵浦-稳压和提升电流的滑模摩擦纳米发电机

分数阶非线性系统的有限时间滑模同步控制

不确定整数阶和分数阶Rössler混沌系统的自适应滑模同步

国内最高额定水头的长龙山抽水蓄能电站引水上斜井滑模混凝土施工顺利完成

《汽车工程》好文推荐4:基于滑模自抗扰的电制动系统动态负载模拟
隧洞滑模机械

分数阶不确定超混沌Bao系统滑模同步的两种方法

穿山机甲系列滑模装备助力大基建领域实现双碳目标 | 绿会绿企工委支持推广
动态滑模控制

不确定时滞耦合复杂网络的滑模追踪控制


科技工作者之家APP是专注科技人才,知识分享与人才交流的服务平台。
 微信
微信
 京公网安备11010202008424号
京公网安备11010202008424号